OU Robotics
Jon Rosewell, Tony Hirst, Karen Kear
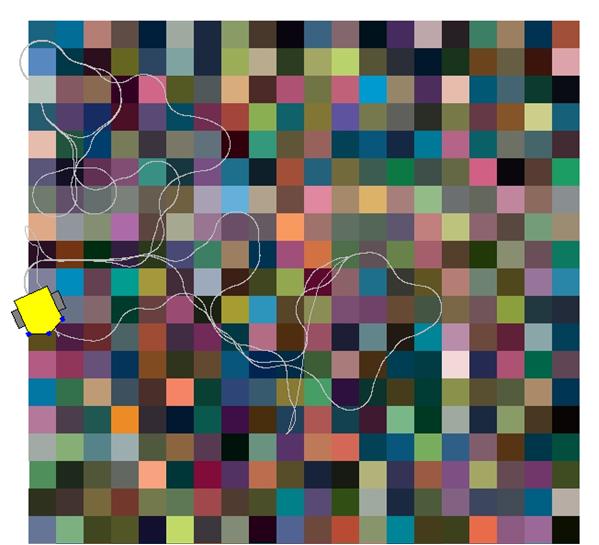
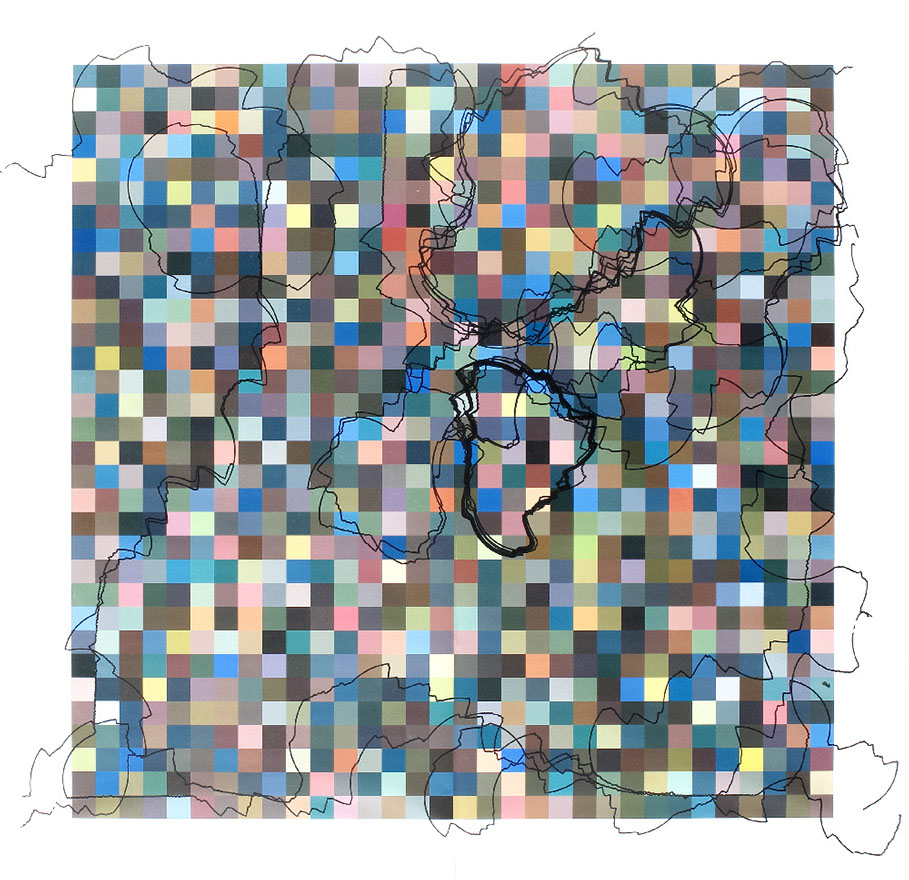
Our response to the seeding image is to use it to imagine what information simple robots can glean from their environment. The image above shows the trail of one simulated robot exploring the patterns it detects using simple light sensors. We propose a performance with several real robots exploring a large print of the image, laid on the floor. We are intrigued to see what patterns and movements emerge from the simple instantiations of behaviours embodied in our robots.
We are colleagues in the Department of Communication and Systems at the UK Open University who use simple robots in our teaching. We have also worked with kids, using low-cost educational robots to explore the interaction of creativity and technology in challenges and competitions such as RoboCupJunior dance and robot fashion shows. An OU/Blue Peter ‘Design a really useful robot’ competition in 2003 attracted 30,000 entries. Tony set up and ran the EPSRC Creative Robotics Research Network (2004-6).